میکرو کنترلر های 32 بیتی
amigaمیکرو کنترلر های 32 بیتی
amigaسرو موتور Servo Motor
سرو موتور های موقعیت RCS
RCSها مخصوص کاربردهای کنترل موقعیت طراحی شده اند.در این گونه موتورها از مودلاسیون عرض پالس (PWM) برای کنترل محور استفاده می شود. به این ترتیب کاربر می تواندمحور را بدون درگیرشدن با مکانیسم های کنترلی و با تغییر چرخه کاری موج PWM اعمالی به موتور در موقعیتهای مختلف قرار دهد.
مقدار چرخش محور در این گونه موتورها محدود می باشد و ممکن است بسته به کارخانه سازنده متفاوت باشد.
معمولا محدوده چرخش محور در این گونه موتورها 180یا 210 درجه می باشد ونمی توان محور رادر یک دور کامل چرخاند.

یک RCS استاندارد به شکل یک جعبه ساده است که شامل یک موتور DC و یک مدار میکروکنترلری و یک ولوم ( برای فیدبک ) و گیربکس می باشد .
وسه رشته سیم، معمولا سیم تغذیه قرمز رنگ و سیم زمین سیاه یا قهوه ای است سیم ورودی نارنجی رنگ است PWM
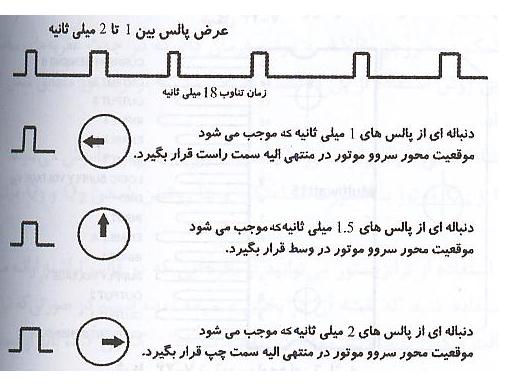
همینطوری که از شکل مشخص است با تغییر اندازه پالس از 1 تا 2 میلی ثانیه میتوان زاویه شفت موتور را تغییر داد.
مثلا در شکل بالا با وارد کردن یک پالس با عرض 1.75 میلی ثانیه شفت موتور در زاویه 45 درجه قرار می گیرد .
سرو ها ممکن است درصد خطایی داشته باشند که آن را باید به دست آورد یعنی باید عرض کمتر یا بیشتری به آن وارد کرد.
Config Servos
این دستور برای پیکری بندی AVR برای اتصال به موتورهای سرو می باشد . ( در محیط بسکام )
Example:
برنامه :
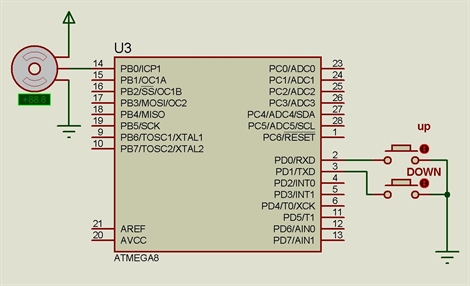
برای کریستال 8 مگاهرتز
Config Portb = Output
Config Portd = Input
Enable Interrupts
Set Portd.0
Set Portd.1
Dim A As Word
A = 96
Do
If Pind.0 = 0 Then A = A + 1
If Pind.1 = 0 Then A = A - 1
Waitms 100
Servo(1) = A
Loop
End