میکرو کنترلر های 32 بیتی
amigaمیکرو کنترلر های 32 بیتی
amiga
انکودر
فلیپ فلاپ نوع D :
به این فلیپ فلاپ برای تشخیص دور موتور نیاز داریم .
شکل زیر مدار داخلی آی سی 7474
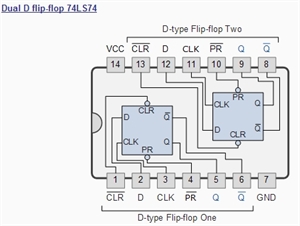
این فلیپ تنها دارای یک ورودی است و از آن به عنوان یک سلول ثبات استفاده می شود .
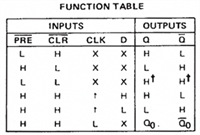
تنها هنگام اعمال لبه بالا رونده پالس ساعت است که خروجی از ورودی تبعیت می کند و تا رسیدن لبه بعدی اطلاعات تغییر نمی کند و ورودی در خروجی تاثیر نمی گذارد. چنانچه ورودی D یک باشد باتحریک پالس ساعت خروجی Q برابر یک می شود. برای عملکرد عادی ورودی های PR و CLR باید یک باشد .
مدار نمونه با آی سی 4013 :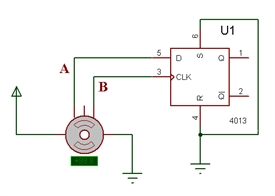
طرز کار مدار به این صورت است در صورت جلو بودن اختلاف فاز B از A خروجی Q روشن و در صورت عقب بودن اختلاف فاز B از A خروجی Q خاموش است .
انکودر: انکودر حسگری است که به محور چرخ یا موتور وصل می شود و می تواند میزان چرخش را اندازه کند . با اندازه گیری میزان چرخش می توانید جابجایی _ سرعت _شتاب یا زاویه چرخشی را تعیین کنید.
انکودر حسگری است که به محور چرخ یا موتور وصل می شود و می تواند میزان چرخش را اندازه کند . با اندازه گیری میزان چرخش می توانید جابجایی _ سرعت _شتاب یا زاویه چرخشی را تعیین کنید.
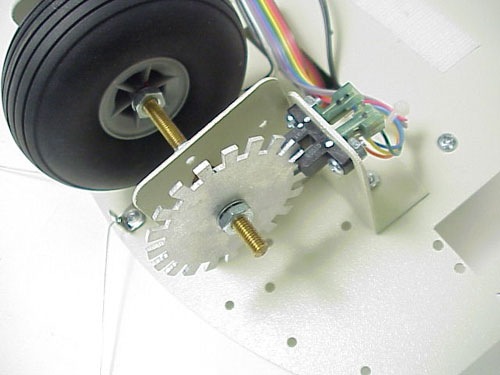
معمولا انکدر ها از نوع نوری می باشند و یک فرستنده و یک گیرنده مادون قرمز در دو سمت یک جسم مکانیکی چرخنده قرار می گیرند و پالسهای الکتریکی تولید می کنند.این پالس ها توسط میکرو کنترلر دریافت می گردند و میزان چرخش را تعیین می شود .
1_انکودر نسبی: Relative Encoder
در این انکودر فقط از یک گیرنده و فرستنده مادون قرمز استفاده می شود که در دو طرف یک چرخ شیاردار قرار گرفته انددر این حالت صرفا موقعیت نسبی جسم چرخنده نسبت به موقعیت اولیه اندازه گیری می شود. در این انکدر نمی توان جهت چرخش ساعتگرد و پادساعتگرد را مشخص کرد.
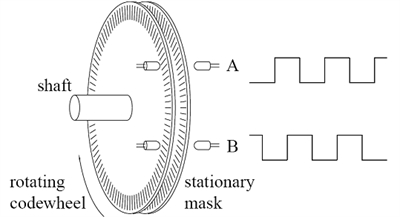
2_انکدر افزایشی : Incremental Encoder
ساختار این انکدر شبیه انکدر نسبی است با این تفاوت که به جای یک گیرنده و فرستنده از دو گیرنده و فرستنده استفاده می شود که در کنار یکدیگر و با فاصله ای مشخص در دو طرف چرخ شیار دار قرار می گیرند. با چرخش جسم شیار دار دو سری پالس تولید می شوند که نسبت به یکدیگر دارای اختلاف فاز می باشند و بر اساس آن می توان جهت چرخش را تعیین کرد.
3_ انکودر مطلق : Absolute Encode
در انکودر مطلق از یک صفحه شفاف استفاده می شود که بخش های خاصی از آن سیاه شده اند. این صفحه در میان چندین گیرنده و فرستنده مادون قرمز قرار می گیرد.در هر لحظه تعدادی از این گیرنده ها صفر و برخی یک را نشان می دهند. بدین ترتیب یک عدد باینری به دست می آید که زاویه ای بین صفر تا 360 درجه را نشان می دهد.
مثال:
اگر تعداد گیرنده ها و فرستنده ها 8 عدد و عدد به دست آمده 00100111 باشد (که در مبنای 10 برابر 39 است) زاویه مطلق برابر خواهد بود با :
انکودر:
معمولا انکدر ها از نوع نوری می باشند و یک فرستنده و یک گیرنده مادون قرمز در دو سمت یک جسم مکانیکی چرخنده قرار می گیرند و پالسهای الکتریکی تولید می کنند.این پالس ها توسط میکرو کنترلر دریافت می گردند و میزان چرخش را تعیین می شود .
1_انکودر نسبی: Relative Encoder
در این انکودر فقط از یک گیرنده و فرستنده مادون قرمز استفاده می شود که در دو طرف یک چرخ شیاردار قرار گرفته انددر این حالت صرفا موقعیت نسبی جسم چرخنده نسبت به موقعیت اولیه اندازه گیری می شود. در این انکدر نمی توان جهت چرخش ساعتگرد و پادساعتگرد را مشخص کرد.
2_انکدر افزایشی : Incremental Encoder
ساختار این انکدر شبیه انکدر نسبی است با این تفاوت که به جای یک گیرنده و فرستنده از دو گیرنده و فرستنده استفاده می شود که در کنار یکدیگر و با فاصله ای مشخص در دو طرف چرخ شیار دار قرار می گیرند. با چرخش جسم شیار دار دو سری پالس تولید می شوند که نسبت به یکدیگر دارای اختلاف فاز می باشند و بر اساس آن می توان جهت چرخش را تعیین کرد.
3_ انکودر مطلق : Absolute Encode
در انکودر مطلق از یک صفحه شفاف استفاده می شود که بخش های خاصی از آن سیاه شده اند. این صفحه در میان چندین گیرنده و فرستنده مادون قرمز قرار می گیرد.در هر لحظه تعدادی از این گیرنده ها صفر و برخی یک را نشان می دهند. بدین ترتیب یک عدد باینری به دست می آید که زاویه ای بین صفر تا 360 درجه را نشان می دهد.
مثال:
اگر تعداد گیرنده ها و فرستنده ها 8 عدد و عدد به دست آمده 00100111 باشد (که در مبنای 10 برابر 39 است) زاویه مطلق برابر خواهد بود با :
(39 / 255) * 360 = 55
برای نمایش آواتار خود در این وبلاگ در سایت Gravatar.com ثبت نام کنید. (راهنما)




















































ایمیل شما بعد از ثبت نمایش داده نخواهد شد